تبدیل pdf به word
اغلب اوقات پیش میاید که کاربران نیاز دارند تا فایل pdf را به word و یا به غیر فایل های دیگه تبدیل کنند و یا نیاز دارند تا از word به pdf تبدیل کنند و از مشهورترین فایل ها برای نوشتن میباشند.
در رابطه با این مطلب سایت هایی هستند که به صورت مجانی این کار را در اختیار کاربران میگذارند از جمله سایت www.gobcl.com در صفحه اصلی سایت این امکان وجود دارد که فایل های pdf را به word و یا به html و یا بر عکس تبدیل نمایید سپس می توانید فایل تبدیل شده را از سایت دانلود نمایید.
از دیگر سایت هایی که به صورت رایگان این کار را میکندwww.pdfonline.com/pdf-to-word-converter
و همچنین سایت www.cometdocs.com به صورت آنلاین و بدون نیاز به نرم افزاری و این امکان را برای تو فراهم میکند که از فرمت های مختلف بتوانید تبدیل نمایید مخصوصا pdf به word.
تبدیل word به pdf
سایت smallpdf.com/ar/word-to-pdf این امکان را فراهم میکند که بتوانید فایل ها را به pdf تبدیل نمایید کار خاصی نمی خواهد انجام دهید فقط در چند ثانیه به راحتی تبدیل میکند . فقط با زدن کلید آبی رنک و کشیدن فایل به مکان مخصوص آن و بعد از آن در انتظار اتمام کار باشید.
سایت های دیگر برای تبدیل pdf به word
http://en.pdf24.org/onlineConverter.html
تبدیل pdf به word از طریق نرم افزار
اگر قصد دارید از طریق نرم افزار ها کار تبدیل پی دی اف به ورد رو انجام بدهید میتوانید با نصب برنامه PDF995 بر روی کامپیوتر خود و در هر زمانی که خواستید از آن استفاده نمایید اگر مایل باشید میتوانید از این سایت دانلود نمایید www.pdf995.com و همچنین برنامه PDFMoto را از این سایت www.pdfmoto.com میتوانید دانلود کنید.
نظر شما چیست ؟
 ۰
۰
۰
۰




















 )
)





 مشخصه دیگری که در مورد ماژول های LED مهم است ، دات پیچ یا Pixel Pitch است . دات پیچ فاصله مرکز تا مرکز پیکسل های ماژول است و معمولاً برحسب میلی متر بیان می شود . یک پیکسل در ماژول های تک رنگ از یک LED ، در ماژول های Dual از دو LED مجاور هم ، در ماژول های 2R1G و 2R1B و RGB از سه LED مجاور هم و در ماژول های 2R1G1B از کنار هم قرار گرفتن چهار LED تشکیل می شود . مثلاً دات پیچ ماژول قرمز در تصویر فوق 10 هست چون فاصله مرکز تا مرکز دو LED مجاور معادل با 10mm است .
مشخصه دیگری که در مورد ماژول های LED مهم است ، دات پیچ یا Pixel Pitch است . دات پیچ فاصله مرکز تا مرکز پیکسل های ماژول است و معمولاً برحسب میلی متر بیان می شود . یک پیکسل در ماژول های تک رنگ از یک LED ، در ماژول های Dual از دو LED مجاور هم ، در ماژول های 2R1G و 2R1B و RGB از سه LED مجاور هم و در ماژول های 2R1G1B از کنار هم قرار گرفتن چهار LED تشکیل می شود . مثلاً دات پیچ ماژول قرمز در تصویر فوق 10 هست چون فاصله مرکز تا مرکز دو LED مجاور معادل با 10mm است .
 توجه داشته باشید که هاب خروجی آخرین ماژول در هر سطر به جایی متصل نمی شود و رها می شود . پس دیگر به کابل فلت خروجی نیازی ندارد . نکته دیگر اینکه همانند شکل فوق چنانچه لازم شد که تغذیه یک ستون از ماژول ها از ستون دیگری منشعب شود ، با رعایت علامت تغذیه و با کمک یک زوج سیم برق 1.5 آنها را به یکدیگر متصل نمایید . توجه کنید که VCC را به VCC و همچنین GND را به GND وصل نمایید .
توجه داشته باشید که هاب خروجی آخرین ماژول در هر سطر به جایی متصل نمی شود و رها می شود . پس دیگر به کابل فلت خروجی نیازی ندارد . نکته دیگر اینکه همانند شکل فوق چنانچه لازم شد که تغذیه یک ستون از ماژول ها از ستون دیگری منشعب شود ، با رعایت علامت تغذیه و با کمک یک زوج سیم برق 1.5 آنها را به یکدیگر متصل نمایید . توجه کنید که VCC را به VCC و همچنین GND را به GND وصل نمایید .
 برای برنامه ریزی تابلو با کمک یک کابل که یک سر آن پورت COM نری و سر دیگر آن پورت COM مادگی است ، برد کنترل را به کامپیوتر متصل کنید . این کابل تنها سه اتصال دارد که به شرح زیر می باشد . از پورت COM نری به پورت COM مادگی به ترتیب پین 5 به 5 و پین 3 به 3 و پین 2 به 2 متصل می باشد . این کابل را خودتان می توانید بسازید و یا می توانید یک کابل RS-232 استاندارد از بازار تهیه و جای پین های 2 و 3 یکی از پورت های آن را با هم عوض کنید .
برای برنامه ریزی تابلو با کمک یک کابل که یک سر آن پورت COM نری و سر دیگر آن پورت COM مادگی است ، برد کنترل را به کامپیوتر متصل کنید . این کابل تنها سه اتصال دارد که به شرح زیر می باشد . از پورت COM نری به پورت COM مادگی به ترتیب پین 5 به 5 و پین 3 به 3 و پین 2 به 2 متصل می باشد . این کابل را خودتان می توانید بسازید و یا می توانید یک کابل RS-232 استاندارد از بازار تهیه و جای پین های 2 و 3 یکی از پورت های آن را با هم عوض کنید . 
 یک منبع تغذیه علاوه بر ایجاد ولتاژهای مختلف از طریق خروجی های گوناگون، وظیفه تداوم سرویس و تامین توان مصرفی هر پورت را نیز برعهده دارد وظیفه ای که کیفیت و راندمان انجام آن تفاوت اصلی و مهمترین علت اختلاف قیمت بین بزرگان این کلاس و برندهای گمنام را تعیین می کند. اما این قطعه مهم و تعیین کننده غالبا در حین انتخاب قطعات و در هیجان گزینش برترین پردازنده، رم و البته کارت های گرافیک رنگارنگ معمولا به فراموشی سپرده شده می شود جائیکه بسیاری از کاربران حتی پاور سیستم خود را بصورت تکی انتخاب نکرده و بجای تحقیق پیرامون این قطعه حیاتی ساعت های متمادی را صرف انتخاب ظاهر کیس دستگاه می نمایند کیسی که معمولا پاور ناشناخته ای نیز به همراه آن ارائه می شود. انتخاب این پاورهای ناشناخته بعلت قیمت مناسبی که در مقایسه با همتایان حرفه ای خود دارند با اینکه در نگاه اول کاملا دارای توجیه اقتصادی ست اما در دراز مدت حضور این پاورهای بی کیفیت در سیستم های گرانقیمت بعلت کیفیت نچندان مناسب آنها عملا می تواند ضررهای هنگفت و خسارت های فراوانی به همراه داشته باشد که مطمئنا رقم بسیار سنگین تری در قیاس با خرید یک پاور حرفه ای به کاربران تحمیل می کند. از این رو انتخاب یک پاور مناسب کلید کارکرد صحیح سیستم و راهی برای اطمینان از نامین انرژی مورد نیاز قطعات به حساب می آید. اما برای انتخاب یک پاور مناسب در درجه اول می بایست از مصرف انرژی کلیه قطعات سخت افزاری حاضر در یک سیستم آگاه شد. بعنوان یک نکته کلیدی بیشترین مصرف انرژی در کامیپوترهای خانگی به پردازنده، کارت گرافیک و هارد دیسک تعلق دارد از همین رو برای تامین برق برخی از این قطعات اتصال جداگانه ای نیز از پاور در نظر گرفته شده است. محاسبه کل میزان مصرف انرژی در یک سیستم با جمع زدن توان مصرفی کلیه قطعات صورت می پذیرد برای انجام این کار یا می بایست با بصورت دستی اقدام نمود و یا اینکه از محاسبه گرهای آنلاین که بصورت اتوماتیک با گرفتن اطلاعات سیستم میزان وات مورد نیاز را در اختیار شما قرار می دهند استفاده کرد نمونه یکی از این محاسبه گرها را در
یک منبع تغذیه علاوه بر ایجاد ولتاژهای مختلف از طریق خروجی های گوناگون، وظیفه تداوم سرویس و تامین توان مصرفی هر پورت را نیز برعهده دارد وظیفه ای که کیفیت و راندمان انجام آن تفاوت اصلی و مهمترین علت اختلاف قیمت بین بزرگان این کلاس و برندهای گمنام را تعیین می کند. اما این قطعه مهم و تعیین کننده غالبا در حین انتخاب قطعات و در هیجان گزینش برترین پردازنده، رم و البته کارت های گرافیک رنگارنگ معمولا به فراموشی سپرده شده می شود جائیکه بسیاری از کاربران حتی پاور سیستم خود را بصورت تکی انتخاب نکرده و بجای تحقیق پیرامون این قطعه حیاتی ساعت های متمادی را صرف انتخاب ظاهر کیس دستگاه می نمایند کیسی که معمولا پاور ناشناخته ای نیز به همراه آن ارائه می شود. انتخاب این پاورهای ناشناخته بعلت قیمت مناسبی که در مقایسه با همتایان حرفه ای خود دارند با اینکه در نگاه اول کاملا دارای توجیه اقتصادی ست اما در دراز مدت حضور این پاورهای بی کیفیت در سیستم های گرانقیمت بعلت کیفیت نچندان مناسب آنها عملا می تواند ضررهای هنگفت و خسارت های فراوانی به همراه داشته باشد که مطمئنا رقم بسیار سنگین تری در قیاس با خرید یک پاور حرفه ای به کاربران تحمیل می کند. از این رو انتخاب یک پاور مناسب کلید کارکرد صحیح سیستم و راهی برای اطمینان از نامین انرژی مورد نیاز قطعات به حساب می آید. اما برای انتخاب یک پاور مناسب در درجه اول می بایست از مصرف انرژی کلیه قطعات سخت افزاری حاضر در یک سیستم آگاه شد. بعنوان یک نکته کلیدی بیشترین مصرف انرژی در کامیپوترهای خانگی به پردازنده، کارت گرافیک و هارد دیسک تعلق دارد از همین رو برای تامین برق برخی از این قطعات اتصال جداگانه ای نیز از پاور در نظر گرفته شده است. محاسبه کل میزان مصرف انرژی در یک سیستم با جمع زدن توان مصرفی کلیه قطعات صورت می پذیرد برای انجام این کار یا می بایست با بصورت دستی اقدام نمود و یا اینکه از محاسبه گرهای آنلاین که بصورت اتوماتیک با گرفتن اطلاعات سیستم میزان وات مورد نیاز را در اختیار شما قرار می دهند استفاده کرد نمونه یکی از این محاسبه گرها را در  بدین ترتیب پس از مشخص شدن حضور سرهای مورد نیاز برای تامین انرژی سخت افزارهای گوناگون در یک سیستم بیشتر مسیر برای انتخاب یک پاور مناسب پیموده شده است. گام آخر در این زمینه خواندن برچسب مستطیل شکلی ست که بروی هر پاوری فارغ از قیمت یا قابلیت های آن چسبانده شده است. این برچسب توان واقعی پاور را نشان می دهد البته این توان معمولا پائین تر از آن رقمی ست که فروشنده به شما می گوید و بالای این برچسب با فونت بزرگ نوشته شده است. برای فهمیدن توان واقعی پاور، می بایست وات های درج شده برای هر یک از سرهای خروجی پاور که جزء به جزء در این برچسب نوشته شده است را با هم جمع نمود بیشترین توان در این لیست به سر 12 ولت تامین کننده برق CPU و اتصال 24/20 پینی اصلی مادربورد تعلق دارد.
بدین ترتیب پس از مشخص شدن حضور سرهای مورد نیاز برای تامین انرژی سخت افزارهای گوناگون در یک سیستم بیشتر مسیر برای انتخاب یک پاور مناسب پیموده شده است. گام آخر در این زمینه خواندن برچسب مستطیل شکلی ست که بروی هر پاوری فارغ از قیمت یا قابلیت های آن چسبانده شده است. این برچسب توان واقعی پاور را نشان می دهد البته این توان معمولا پائین تر از آن رقمی ست که فروشنده به شما می گوید و بالای این برچسب با فونت بزرگ نوشته شده است. برای فهمیدن توان واقعی پاور، می بایست وات های درج شده برای هر یک از سرهای خروجی پاور که جزء به جزء در این برچسب نوشته شده است را با هم جمع نمود بیشترین توان در این لیست به سر 12 ولت تامین کننده برق CPU و اتصال 24/20 پینی اصلی مادربورد تعلق دارد. خب حالا با مشخص شدن توان مورد نیاز و حصول اطمینان از حضور پورت های مورد نیاز کامپیوتر زمان نصب پاور در کیس فرا می رسد این مرحله البته برای کاربران حرفه ای نکته خاصی در بر ندارد و ما صرفا آن را برای کاربران کمتر حرفه ای تر و برای آسان نمودن این کار توضیح می دهیم. اولین کار برای نصب پاور جای دادن آن در محفظه پشتی کیس یعنی در جائی ست که توری های خروجی هوا در پشت کیس قرار دارند. برای جای دادن پاور در این قسمت در برخی موارد ممکن است نیاز به برداشتن بخش بالائی کیس باشد.
خب حالا با مشخص شدن توان مورد نیاز و حصول اطمینان از حضور پورت های مورد نیاز کامپیوتر زمان نصب پاور در کیس فرا می رسد این مرحله البته برای کاربران حرفه ای نکته خاصی در بر ندارد و ما صرفا آن را برای کاربران کمتر حرفه ای تر و برای آسان نمودن این کار توضیح می دهیم. اولین کار برای نصب پاور جای دادن آن در محفظه پشتی کیس یعنی در جائی ست که توری های خروجی هوا در پشت کیس قرار دارند. برای جای دادن پاور در این قسمت در برخی موارد ممکن است نیاز به برداشتن بخش بالائی کیس باشد. پس از جای گیری کامل پاور در جای خود و قرار گرفتن سوراخ های بستن پیچ در محل های تعیین شده نوبت به سفت کردن پیچ ها می رسد. پس از سفت شدن پاور در جای خود نوبت به مرحله گیج کننده اتصال سیم ها می رسد.
پس از جای گیری کامل پاور در جای خود و قرار گرفتن سوراخ های بستن پیچ در محل های تعیین شده نوبت به سفت کردن پیچ ها می رسد. پس از سفت شدن پاور در جای خود نوبت به مرحله گیج کننده اتصال سیم ها می رسد.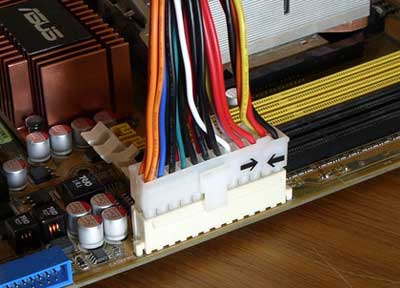 دو سیم اصلی در این قسمت که بصورت مشترک و فارغ از پلتفرم و نوع سیستم همواره به یک صورت در جای خود قرار می کیرند یکی پورن 24/20 پینی مادربورد است که از همه پورت ها بزرگتر بوده و تنها به یک صورت در جائی کاملا مشخص که معمولا در پائین CPU قرار دارد قرار می گیرد.
دو سیم اصلی در این قسمت که بصورت مشترک و فارغ از پلتفرم و نوع سیستم همواره به یک صورت در جای خود قرار می کیرند یکی پورن 24/20 پینی مادربورد است که از همه پورت ها بزرگتر بوده و تنها به یک صورت در جائی کاملا مشخص که معمولا در پائین CPU قرار دارد قرار می گیرد.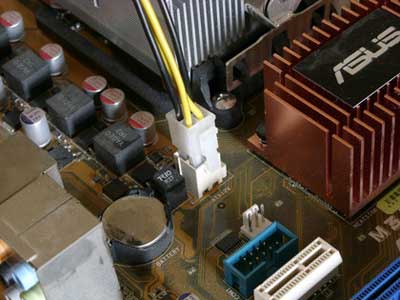 پورت استاندارد و مشترک دیگر در بیشتر مادربورد ها پورت چهار پینی 12 ولت ATX است که وظیفه برق رسانی به CPU را برعهده دارد این پورت کاملا در نزدیکی پردازنده قرار دارد. در پردازنده های پیشرفته سوکت 1366 اینتل از سر 8 پینی مخصوص دیگری استفاده می شود که پیش از تهیه پاور می بایست از حضور آن اطمینان حاصل کرد.
پورت استاندارد و مشترک دیگر در بیشتر مادربورد ها پورت چهار پینی 12 ولت ATX است که وظیفه برق رسانی به CPU را برعهده دارد این پورت کاملا در نزدیکی پردازنده قرار دارد. در پردازنده های پیشرفته سوکت 1366 اینتل از سر 8 پینی مخصوص دیگری استفاده می شود که پیش از تهیه پاور می بایست از حضور آن اطمینان حاصل کرد. پس از اتصال این دو پورت می بایست به سراغ درایوها و هارد دیسک ها برویم. در اینجا و در هر دو مورد با دو گزینه جدید و قدیم روبرو هستیم جائیکه مدل های قدیمی تر از اتصال ریبون IDE برای گذر اطلاعات و از پورت های چهار پینی سفید رنگ موسوم به Molex برای تامین برق خود استفاده می کنند درایو و هارد دیسک های جدیدتر از پورت های SATA در ورژن های گوناگون برای گذر اطلاعات استفاده نموده و پورت تامین برق آنها نیز بکلی تغییر شکل داده است.
پس از اتصال این دو پورت می بایست به سراغ درایوها و هارد دیسک ها برویم. در اینجا و در هر دو مورد با دو گزینه جدید و قدیم روبرو هستیم جائیکه مدل های قدیمی تر از اتصال ریبون IDE برای گذر اطلاعات و از پورت های چهار پینی سفید رنگ موسوم به Molex برای تامین برق خود استفاده می کنند درایو و هارد دیسک های جدیدتر از پورت های SATA در ورژن های گوناگون برای گذر اطلاعات استفاده نموده و پورت تامین برق آنها نیز بکلی تغییر شکل داده است. پورت های سفید رنگ Molex با کمک تبدیل های ساده ای به پورت های برق SATA تبدیل می شوند.
پورت های سفید رنگ Molex با کمک تبدیل های ساده ای به پورت های برق SATA تبدیل می شوند. پورت اتصالی بعدی که البته تنها در سیستم های گرافیکی حرفه ای و نیمه حرفه ای به چشم می خورد کابل 6 یا 8 پین مخصوصی ست که وظیفه تامین انرژی کارت های گرافیکی نصب شده بروی پورت PCIe را بر عهده دارند این پورت ها بسته به نوع و تعداد کارت های این قسمت چینش های متفاوتی دارند.
پورت اتصالی بعدی که البته تنها در سیستم های گرافیکی حرفه ای و نیمه حرفه ای به چشم می خورد کابل 6 یا 8 پین مخصوصی ست که وظیفه تامین انرژی کارت های گرافیکی نصب شده بروی پورت PCIe را بر عهده دارند این پورت ها بسته به نوع و تعداد کارت های این قسمت چینش های متفاوتی دارند. پس از گذر از این چهار مرحله تقریبا تمامی اتصالات اصلی منبع تغذیه در جای خود قرار گرفته اند و با وصل کردن سیم های برق رسان به کلیدهای خارجی کیس، دستگاه آماده روشن شدن است.
پس از گذر از این چهار مرحله تقریبا تمامی اتصالات اصلی منبع تغذیه در جای خود قرار گرفته اند و با وصل کردن سیم های برق رسان به کلیدهای خارجی کیس، دستگاه آماده روشن شدن است.
















 .
.